变形救援机器人

智东西
编译 | 周炎
编辑 | 云鹏
智东西3月24日消息,近日,《Science Advances》杂志刊登了北卡罗来纳州立大学(North Carolina State University)研究人员的最新研究成果:一种受到毛毛虫等软体动物启发,而设计出的具有双向运动的节能爬行机器人。
据悉,这个软体爬行机器人通过在基于液晶弹性体(liquid crystal elastomer)的热双晶驱动器(thermal bimorph actuator)中对分布式、可编程的纳米银线(AgNW)加热器进行焦耳加热,最后实现前后运动。除此之外,研究人员还预测和优化了机器人在热刺激下的局部曲率;研究了爬行速度对双向驱动方式的影响;最后,研究人员证明了机器人具有通过有限间距障碍物的能力,可用于搜索和救援。
一、热驱动材料受热模拟软体动物运动软体爬行机器人在生物医学工程、手术辅助、感知技术等领域受到广泛关注。一直以来,人们从动物世界中获得了很多灵感,也曾有将软材料和软体机器人设计相结合的尝试,例如,章鱼、蛇、毛毛虫等。这些动物具有一些独特的功能,包括多模态运动(multimodal locomotion)、通过狭窄的间隙、在复杂和非结构化的环境中运动。
研究人员一直探索使用不同的刺激方法来驱动软体爬行机器人,包括压力、热力、电场作用、磁场等。在这些类型的刺激中,电刺激是最简单的一种,其中电活性聚合物(electrically stimulated actuators)被广泛使用。对于电活性聚合物来说,离子激活(ionic activation)通常在电解质环境中操作,而场激活需要高电压,因此电活性聚合物这种方式的使用范围受到限制。
另一种类型的电刺激制动器——热双芯片致动器,因为具有可编程操作、重量轻、低驱动电压、无电解质、无束缚操作等优势,所以引起了广泛关注。
在不同的热驱动材料中,液晶弹性体作为一种结合了聚合物网络(polymer network)和液晶介体(liquid crystal mesogens)的热驱动材料,因其驱动能力强大且可逆、可加工性高、可编程等独特特性而备受关注。
随着温度的升高,液晶介体由列相(nematic phase)转变为各向同性相(isotropic),导致材料发生明显的宏观变形。已经设计和制造的出来各种基于LCE的驱动器,它们通常由环境加热、光热效应(photothermal effects)和电热驱动器(eletrothemal actuation)驱动。最近一项研究已经成功地将可拉伸电阻加热器(strechable resistive heaters)与液晶弹性体集成,以更好地控制电信号。
研究人员制造了一种具有多种运动模式的双向软体爬行机器人。它通过在基于液晶弹性体的热双晶驱动器中对分布式、可编程的纳米银线加热器进行焦耳加热实现。研究人员通过对已经设计好的纳米银线加热和可编程加热等两种方式,实现了不同的温度分布和曲率分布。同时由于机器人加热前后端与地面产生不同的摩擦,从而实现了双向运动。
为了证明爬行机器人在潜在应用中的功能,研究人员还描述了前进和反向运动的性能,并测试了通过密闭间隙的场景。通过实践和有限元分析,研究人员研究了爬行机器人的运动方式、爬行速度以及通过小间隙障碍物的能力。
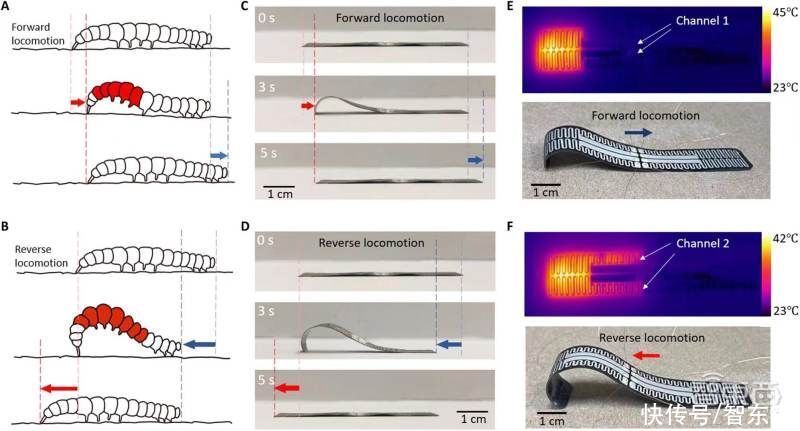
二、珍珠母蛾的运动启发出履带式爬行机器人在自然界中,珍珠母蛾(Pleurotya rural)是双向运动的。在向前移动的过程中,珍珠母蛾的幼虫通常会固定住前端来向前移动尾巴,做这个动作的同时,幼虫还会收缩后端的几节,这就使得幼虫背部产生一个典型的驼峰。随后,幼虫会在锚定终端尖端时释放驼峰,然后,整个履带(caterpillar)再次变平,而幼虫向前移动了一步。
在反方向运动时,幼虫将末端固定在地面上,然后通过身体中部进行有力的收缩。这种运动产生了一个巨大的驼峰,拱起了整个身体。然后,当幼虫锚定前部时,释放驼峰,再次变平并向后移动一步。
实现双向运动的关键是对身体曲率的控制,虽然幼虫的运动学涉及对不同的身体部位进行更复杂的主动控制,但对于软体爬行机器人来说,只需要控制身体局部的曲率就可以模仿像幼虫一样的双向运动。
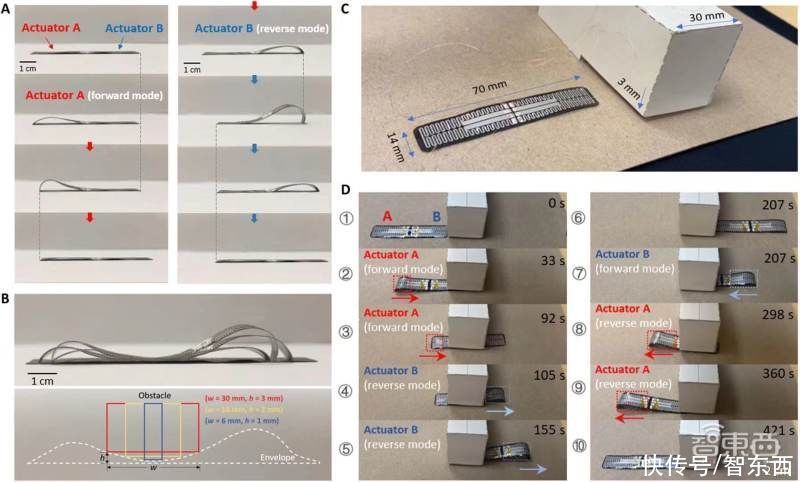
下面图1C和D显示了爬行机器人在不同加热通道(或模式)加热时的正向或反向运动。当加热关闭时,弯曲双晶结构(bent bimorph structure)的松弛会使执行器向前后向后完成一个周期的运动。
图1的E和F分别为通道1和通道2加热时,执行器对应的红外图像和倾斜视图。在图1的C和D中,两个内电极和两个外电极施加恒定电流导致正向或反向运动。
爬行动物的启发
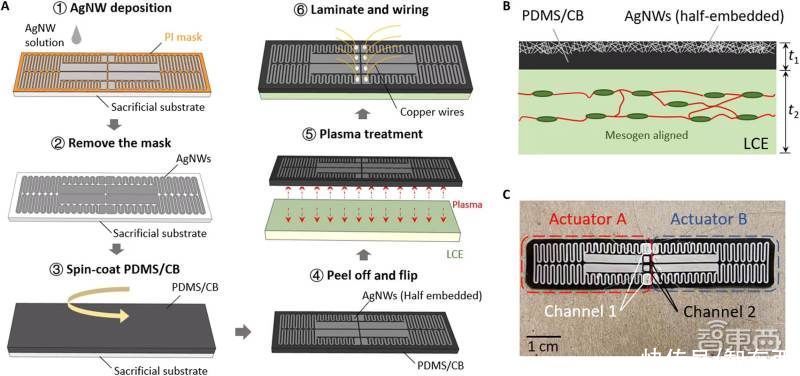
图2A展示了爬行机器人的制作过程。纳米银线因其优异的导电性和机器顺应性,已被广泛地用作软器件中的加热材料。在这项工作中,研究人员使用纳米银线作为加热元件,嵌入在聚二甲基硅氧烷(polydimathylsiloxane)基质的表面下。
该爬行机器人是一种双晶结构,在液晶弹性体带上粘合纳米银线、聚二甲基硅氧烷和炭黑(carbon black)等组成复合薄膜。纳米银线呈渗流网络结构(percolation network structure),在聚二甲基硅氧烷中掺杂炭黑粉以提高导热性,然后将二者滴在纳米银线网络中进行固化。纳米银线网络半嵌入在聚二甲基硅氧烷和炭黑的复合材料表面下。
值得注意的是,与纯聚二甲基硅氧烷相比,质量比为4:1的聚二甲基硅氧烷和炭黑混合物的导热系数提高了31%,但杨氏模量(Young’s modulus)没有明显变化。
当电流施加到纳米银线网络中,焦耳加热产生的热量传递到聚二甲基硅氧烷和炭黑的复合层以及液晶弹性体层。此时,半嵌入的银纳米线网络结构位于聚二甲基硅氧烷和炭黑混合物表层以及液晶弹性体表层之上,这是因为聚二甲基硅氧烷和炭黑混合物表面比银纳米线表面更能与液晶弹性体表面形成更强的键合。
当温度升高时,聚二甲基硅氧烷和炭黑混合物由于热膨胀作用膨胀起来,而液晶弹性体由于向列-各项同性转变而收缩。
图二C展示了爬行机器人的俯视图。每个执行器包含两个导电通道(1和2)。通过设计好的纳米银线加热模式,从而定制温度分布,来实现爬行机器人的运动。双向运动的性能主要包括三个方面:加热性能、摩擦力分析、以及电源振幅和频率的影响。
履带式爬行机器人的设计与制造
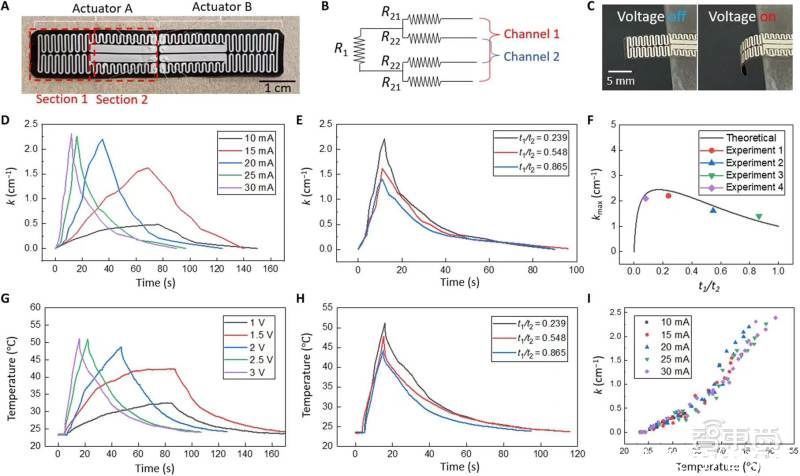
从图3可以看出,导电的纳米银线由两个对称部分组成,每个部分包含两个截面。如图3A所示,第1节均匀覆盖宽为0.65mm的蛇形导电线,第二节由两部分组成,每组包含一条宽度为0.65mm的蛇形线和一条平行的2.4mm的粗直线。
电路模型如图3B所示,此研究中,图3B中的R1、R21、R22,电阻分量分别为115.4、38.3、3.2欧姆。因此,通道1的电阻为193欧姆,通道2的电阻为121.8欧姆。为了展现爬行机器人的加热和驱动性能,研究人员对电流和纳米银线、聚二甲基硅氧烷、炭黑薄膜与液晶弹性体带的双层厚度比进行了参数化研究。
图3D显示了在10-30mA的不同电流下,样品的曲率随时间的函数。随着电流的增大,加热时间由80s显著下降到12s。当样品弯曲到圆形时,电源停止。
图3E显示了不同厚度比时的曲率变化随时间的变化,在相同的外加电流和相同的加热时间下,厚度比值为0.239时,弯曲曲率最大。
软爬行机器人的加热性能
图4A中,左面是履带机器人向前运动方式的快照。在快照2中,当执行器的通道1被激活时,执行器A开始拱起,并引起左右端(fA和fB)的摩擦。由于弧形的不对称性,假设fA在fB之前增大并达到滑动摩擦准则,那么就会出现左端向右滑动,而左端保持静止的情形。当电源关闭时,不对称圆弧形的松弛导致摩擦力fA和fB同时切换方向,这次fB首先达到滑动摩擦准则,开始向右移动,而此时左端被锚定,直至机器人回到最初的平坦状态。
图4B中,左面显示了执行器A通道2被激活时执行器的反向模式。在反向模式下,机器人的中间部分被抬起,使右端与地面之间的接触面更小。这种与地面接触面积的差异导致了相反的摩擦结果。
为了验证上述假设,研究人员使用完全的Abaqus环境进行了有限元分析。该柔性履带模型为双层三维变形结构(three-dimensional formable structure),地面模型为刚性表面(rigid surface)。研究人员通过将变形的爬行机器人进行拖动实验,测量了摩擦系数,同时发现,被划定的加热面积与实验中红外图像观察到的相同,仿真结果与实验结果在运动方向和相对平面外位移(locomotion direction and relative out-of-plane displacement)。
图4C表明,fA

履带式机器人的两种爬行模式
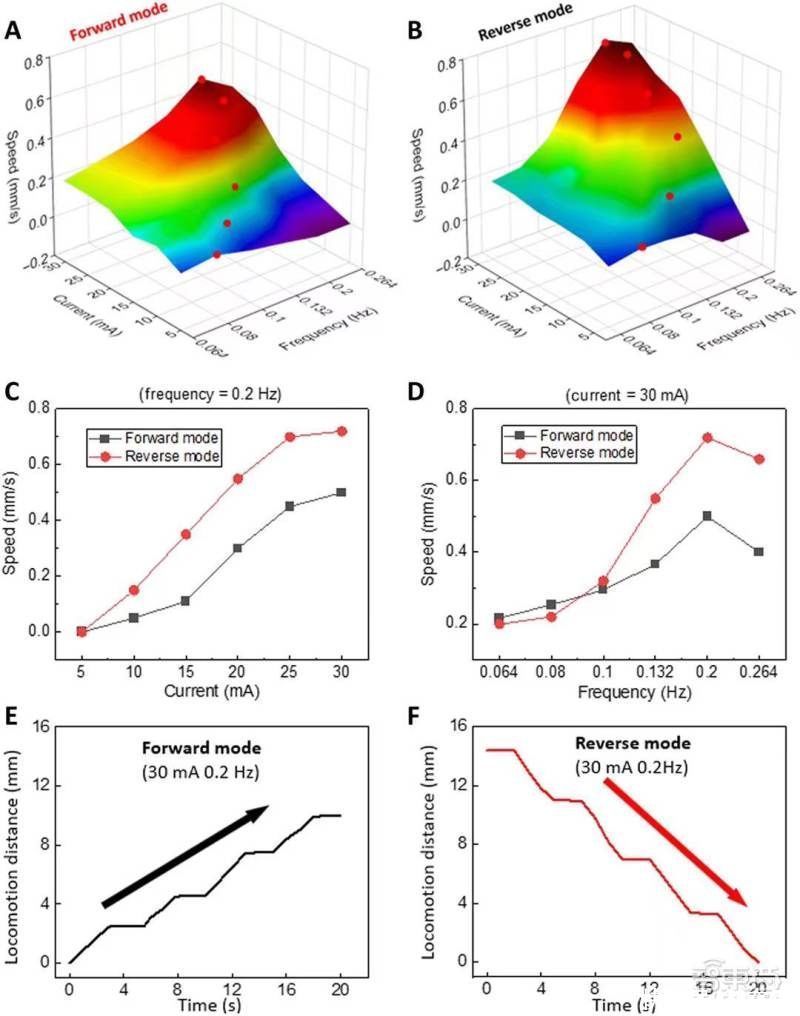
图5展示了爬行机器人的运动速度与外加电流和驱动频率的关系。一般情况下,正反两种模式的速度都随着外加电流的增加而增加。但从速度与频率的关系来看,运动速度随着驱动频率的增加先增大后减小。当达到最大值时,频率的进一步增加使运动速度明显降低,这是由于每个驱动周期所需的最小加热和冷却时间。
爬行机器人的运动速度
最后,研究人员希望验证机器人通过狭小受限空间的能力。具体来讲,研究人员设置一个高度仅为3mm,长度为30mm的密闭隧道,在不受约束的情况下,爬行机器人的正向高度可达8.9mm,反向高度可达14.5mm。
爬行机器人通过间隙的演示
研究发现,在不同的驱动下,热驱动的软爬行机器人具有多步态能力,这与此前大多数报道的软爬机器人不同。此前的软爬行机器人既不能改变步态通过密闭空间,也不能双向移动。热驱动的软爬行机器人这种在前进和后退运动中通过密闭空间的能力在未来搜索和救援等许多应用中具有很好的潜力。
结语:仿生机器人快速发展,未来应用场景众多事实上,像软体爬行机器人一样,通过模仿自然界中生物的外部形状、运动原理和行为方式,来从事生物特点工作的机器人还有很多。随着人工智能技术的发展,仿生机器人将会执行更多样化的任务,完成更人性化的动作,控制水平也将更加精确化。
而当使用场景更加明确后,仿生机器人会朝着更加仿生、更加微型化方向发展,以此来满足多样化的使用场景,就像这些软体爬行机器人将来就可能运用于搜索和救援任务,而又因为它们足够小,可以探索搜救犬和人类无法进入的地方。
来源:《Science Advances》
","gnid":"9a7be872ebe5f62d4","img_data":[{"flag":2,"img":[{"desc":"","height":"340","title":"","url":"https://p0.ssl.img.360kuai.com/t01ec5db95718794b33.jpg","width":"800"},{"desc":"","height":"431","title":"","url":"https://p0.ssl.img.360kuai.com/t0110168bf0264611bd.jpg","width":"800"},{"desc":"","height":"376","title":"","url":"https://p0.ssl.img.360kuai.com/t01a7aa75fafa8fcd38.jpg","width":"800"},{"desc":"","height":"476","title":"","url":"https://p0.ssl.img.360kuai.com/t018ec5c95877d0390e.jpg","width":"800"},{"desc":"","height":"615","title":"","url":"https://p0.ssl.img.360kuai.com/t015b798fb08978e2b6.jpg","width":"800"},{"desc":"","height":"1016","title":"","url":"https://p0.ssl.img.360kuai.com/t01b53c471045e51c90.jpg","width":"800"},{"desc":"","height":"482","title":"","url":"https://p0.ssl.img.360kuai.com/t01253b99a9ea7df601.jpg","width":"800"}]}],"original":0,"pat":"art_src_3,fts0,sts0","powerby":"hbase","pub_time":1679662980000,"pure":"","rawurl":"http://zm.news.so.com/b4665c7c7db84fb7494dcf86251be91d","redirect":0,"rptid":"793fe2d002e92c79","rss_ext":[],"s":"t","src":"智东西","tag":[{"clk":"ktechnology_1:机器人","k":"机器人","u":""}],"title":"“毛毛虫”机器人登上Science子刊,可前后爬行,未来或能用于救援
薄印炒2471求一部动画片的名字角色有喷射,螺旋,求援 -
冀晏轻18357459945 ______ 没有,变形金刚里的都叫:擎天柱,大黄蜂,铁皮,救护车,横炮,爵士,声波,威震天,红蜘蛛,眩晕,吵闹,浑天豹,碎骨魔,大力神,路障,边路,眩晕,堕落者.....
薄印炒2471翡翠台播过的与机器人有关的动画片 -
冀晏轻18357459945 ______ 有一部,是香港公司出品的,叫《时空冒险记》,日本的《帝皇战纪》,《机甲露宝》讲的是救援行动的,很多机器人,小时候很喜欢看,还把它的玩具都买了,还有《SD高达》,其他的都是高达系列什么的,还有《铁人28》. 那部只有一个人高度的,应该是《SD高达》了,里面他的还有2个高达同伴是吧,一个叫“爆热丸”,一个叫“零式” 又或者是《机械小立方》吧,机械人会变交通工具的
薄印炒2471找一部好像是出自日本机器人动漫. -
冀晏轻18357459945 ______ 钢铁拯救队也叫做救援机械人 在优酷上面可以搜到...请采纳~谢谢!
薄印炒2471变形金刚3观后感300字 -
冀晏轻18357459945 ______ [变形金刚3观后感300字]1.情节有点飘,感觉不如前两部,但同样好看; 2.女主角还是一样性感火辣; 3.男女主角确实很不般配啊,男主角看着太嫩,倒是反派和女主角挺配的——不考虑作为,只看外型的话; 4.场面还是一样的火爆刺激,类...
薄印炒2471急 ,速说变形金刚1的大概剧情是什么? 我2点45的电影票要去看变形金刚2,那位说说1的剧情? -
冀晏轻18357459945 ______ 剧情介绍 小青年山姆生日那天,老爸开车带着他到处转,决定给山姆一个惊喜:给他买一辆自己的汽车.山姆开心得很,即使爸爸只够钱给他买一辆二手车. 二手车店的黑人老板鲍比推荐了一辆看起来烂烂的黄色汽车给山姆,山姆上去试了一...
薄印炒2471变形金刚3观后感300字左右 -
冀晏轻18357459945 ______ 今天,我到全球通影院看完了长达155分钟的3D大片《变形金刚3》.影片中令人炫目的“变”深深地震撼了我. 霸天虎军团的变形能力强,他们能发射一种红光,红光照射到任何一种物体上(...
薄印炒2471变形金刚4好像有好几个人物都增加了,其中有营救车( Wreck - Gar )垃圾星的战士起到的是 -
冀晏轻18357459945 ______ 营救车他是领导一群来自垃圾星的战士的领导人,他是由一堆生锈的废弃材料,与部分汽车的材料,以及其他许多垃圾所制造而成的,到处是缺陷.注意力不集中,嘴里喜欢嘟囔着零碎的单钧的句子.他所用的辞汇就像是电视商业广告和无线广播歌谣的废品回收站.在机器人模式下,他手持利斧和?速镭射枪,能干扰敌人的头脑脉冲.
薄印炒2471关于变形金刚电影中的擎天柱 -
冀晏轻18357459945 ______ 先总结一下擎天柱在真人世的特点吧,仁慈,善于变通,心胸宽阔,思考到位,天真,坚定不移,谦虚,勇敢.以下一一结合电影分析 仁慈,在变形金刚1很明显可以看得出,当得知SAM有眼镜的时候,擎天柱是很绅士的请SAM拿出眼镜,不会...
薄印炒2471变形金刚里面的车子 -
冀晏轻18357459945 ______ 狂派:霸天虎首领威震天是一架赛博坦喷射飞船 路障是Saleen S281警车 红蜘蛛是洛克希德马丁F-22猛禽战斗 大块头眩晕是西科斯基MH-53重型运输直升机 体积最小的迷乱是一部经常变形为家常电器用品的机器人 博派:汽车人首领擎天柱是一部18轮大卡车(具体牌子不知道...) 大黄蜂是一部雪佛兰CAMARO 救护车力捷是一部悍马H2型救援车 汽车人武器专家铁皮是GMC4500/TOPKICK(通用托普基克皮卡) 特种部队队长爵士是庞蒂亚克(或叫庞迪克)Solstice跑车
薄印炒2471最新pc版变形金刚中铁皮在救爵士的时候如何打败那个搅拌机车人那个
冀晏轻18357459945 ______ 是把他搞倒下之后,过去举起来扔出去即可直升机打铁皮,把其他小兵灭光,他就会冲撞攻击,停下时,拿东西扔他,然后扁之,扁一次,又有小兵,铁皮又打不来了,就灭光小兵,重复N次采纳啦