安川机器人直角坐标图
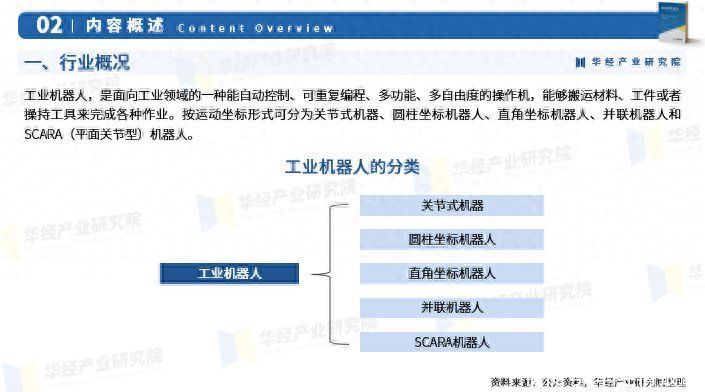
工业机器人,是面向工业领域的一种能自动控制、可重复编程、多功能、多自由度的操作机,能够搬运材料、工件或者操持工具来完成各种作业。按运动坐标形式可分为关节式机器、圆柱坐标机器人、直角坐标机器人、并联机器人和SCARA(平面关节型)机器人。
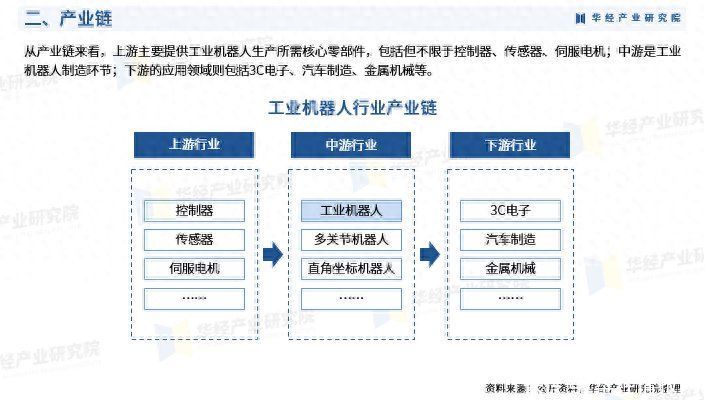
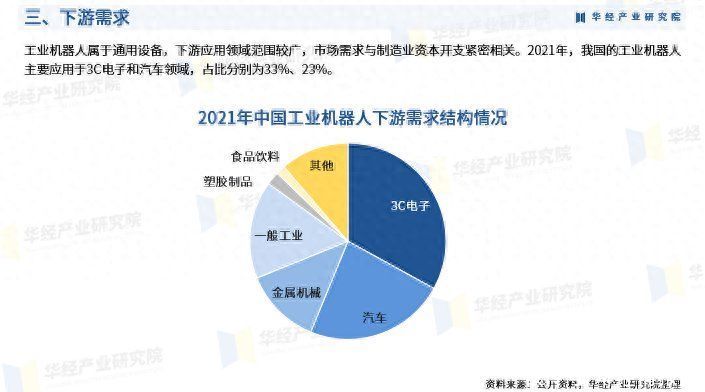
从产业链来看,上游主要提供工业机器人生产所需核心零部件,包括但不限于控制器、传感器、伺服电机;中游是工业机器人制造环节;下游的应用领域则包括3C电子、汽车制造、金属机械等。工业机器人属于通用设备,下游应用领域范围较广,市场需求与制造业资本开支紧密相关。2021年,我国的工业机器人主要应用于3C电子和汽车领域,占比分别为33%、23%。
新能源汽车与光伏产业的高景气度带来了对工业机器人的增量需求,成为中国工业机器人行业发展的主引擎,我国的工业机器人产量持续扩张,维持在高位运行,2022年的产量为44.31万套,同比上涨21.04%。数据显示,2022年中国工业机器人销量为30.3万台,同比增长16%,我国作为全球最大工业机器人消费国,稳居全球第一大工业机器人市场,2022年的工业机器人的国产化率约为40%,产品主要集中在低端市场。2022年,工业机器人四大家族(ABB、发那科、库卡、安川电机)在中国工业机器人市场占据了约40%的份额,虽然我国的工业机器人市场仍以外资品牌机器人为主,但是随着国产机器人进一步提升性能及扩大应用领域,内资品牌的市场份额逐年增加,国产替代进程在显著加速。
华经产业研究院研究团队使用桌面研究与定量调查、定性分析相结合的方式,全面客观的剖析工业机器人行业发展的总体市场容量、产业链、竞争格局、经营特性、盈利能力和商业模式等。科学使用SCP模型、SWOT、PEST、回归分析、SPACE矩阵等研究模型与方法综合分析工业机器人行业市场环境、产业政策、竞争格局、技术革新、市场风险、行业壁垒、机遇以及挑战等相关因素。根据工业机器人行业的发展轨迹及实践经验,精心研究编制《2023-2029年中国工业机器人行业市场深度分析及投资潜力预测报告》,为企业、科研、投资机构等单位投资决策、战略规划、产业研究提供重要参考。





报告目录:
第一章 工业机器人概述
第一节 基本定义
第二节 分类情况
第三节 行业特征
一、周期性
二、区域性
第二章 中国工业机器人市场环境分析(PEST)
第一节 政治法律环境分析(P)
一、国家主要政策法规
二、地方主要政策法规
第二节 经济环境分析(E)
一、中国GDP分析
二、中国汇率调整分析
三、中国城镇居民家庭人均可支配收入分析
第三节 社会环境分析(S)
一、经济结构转型
二、制造业产业转移
三、劳动力成本上升
四、两化融合快速推进
第四节 技术环境分析(T)
一、专利申请数分析
二、专利申请人分析
三、专利技术构成分析
第三章 中国工业机器人产业链分析
第一节 行业产业链简介
第二节 产业链上游行业分析
一、减速器市场状况分析
二、控制器市场状况分析
三、伺服电机市场状况分析
第三节 产业链下游行业分析
一、汽车领域市场状况分析
二、电子领域市场状况分析
三、铸造领域市场状况分析
四、物流领域市场状况分析
第四章 全球工业机器人发展现状与趋势分析
第一节 全球工业机器人发展历程
第二节 全球工业机器人市场情况
一、全球工业机器人保有量
二、全球工业机器人装机量
三、全球工业机器人下游应用分布
第三节 国际主要国家工业机器人行业发展概况
一、美国工业机器人市场发展
二、日本工业机器人市场发展
三、德国工业机器人行业市场发展
第四节 全球工业机器人发展趋势分析
第五章 中国工业机器人发展现状分析
第一节 中国工业机器人发展历程
第二节 中国工业机器人市场总体规模
第三节 中国工业机器人市场产销情况
一、行业工业总产值
二、行业工业销售产值
三、行业生产情况
四、行业销售情况
第六章 中国工业机器人进出口情况
一、进出口总量分析
二、进出口产品结构分析
三、主要贸易国进出口情况分析
四、主要省市进出口情况分析
第四节 中国工业机器人投融资情况
第七章 中国工业机器人细分市场分析
第一节 工业机器人细分市场概况
一、市场细分充分程度
二、市场细分发展趋势
三、市场细分战略研究
四、细分市场结构分析
第二节 喷涂机器人市场
一、市场发展现状概述
二、行业市场规模分析
三、行业市场需求分析
四、行业进出口情况分析
五、产品市场潜力分析
第三节 搬运机器人市场
一、市场发展现状概述
二、行业市场规模分析
三、行业市场需求分析
四、行业进出口情况分析
五、产品市场潜力分析
第四节 焊接机器人市场
一、市场发展现状概述
二、行业市场规模分析
三、行业市场需求分析
四、行业进出口情况分析
五、产品市场潜力分析
第八章 中国工业机器人市场竞争格局分析
第一节 中国工业机器人行业集中度分析
一、工业机器人市场集中度分析
二、工业机器人企业集中度分析
三、工业机器人区域集中度分析
第二节 中国工业机器人行业竞争五力分析
一、工业机器人行业上游议价能力
二、工业机器人行业下游议价能力
三、工业机器人行业新进入者威胁
四、工业机器人行业替代产品威胁
五、工业机器人行业现有企业竞争
第三节 中国工业机器人行业投资兼并重组整合分析
一、投资兼并重组现状
二、投资兼并重组案例
第九章 国际工业机器人行业领先企业经营情况分析
第一节 瑞士ABB公司
第二节 日本FANUC公司
第三节 德国KUKA公司
第四节 日本安川电机公司
第十章 中国工业机器人行业领先企业经营情况分析
第一节 沈阳新松机器人自动化股份有限公司
一、企业发展基本情况
二、企业经营状况分析
三、企业竞争优势分析
四、企业发展战略分析
第二节 深圳市汇川技术股份有限公司
一、企业发展基本情况
二、企业经营状况分析
三、企业竞争优势分析
四、企业发展战略分析
第三节 埃夫特智能装备股份有限公司
一、企业发展基本情况
二、企业经营状况分析
三、企业竞争优势分析
四、企业发展战略分析
第四节 南京埃斯顿自动化股份有限公司
一、企业发展基本情况
二、企业经营状况分析
三、企业竞争优势分析
四、企业发展战略分析
第五节 广东拓斯达科技股份有限公司
一、企业发展基本情况
二、企业经营状况分析
三、企业竞争优势分析
四、企业发展战略分析
第六节 广州数控设备有限公司
一、企业发展基本情况
二、企业经营状况分析
三、企业竞争优势分析
四、企业发展战略分析
第十一章 中国工业机器人发展趋势与前景分析
第一节 中国工业机器人市场发展潜力
第二节 中国工业机器人市场发展趋势预测
一、工业机器人市场发展趋势
二、工业机器人市场规模预测
三、工业机器人应用趋势预测
四、工业机器人细分市场发展趋势预测
第三节 中国工业机器人行业产销预测
一、中国工业机器人产量预测
二、中国工业机器人销量预测
第十二章 工业机器人行业投资风险预警
第一节 影响工业机器人行业发展主要因素
一、影响工业机器人行业运行有利因素
二、影响工业机器人行业运行不利因素
三、我国工业机器人行业发展面临挑战
四、我国工业机器人行业发展面临机遇
第二节 工业机器人行业投资风险预警
一、工业机器人行业市场风险预测
二、工业机器人行业政策风险预测
三、工业机器人行业经营风险预测
四、工业机器人行业技术风险预测
五、工业机器人行业竞争风险预测
六、工业机器人行业其他风险预测
华经情报网隶属于华经产业研究院,专注大中华区产业经济情报及研究,目前主要提供的产品和服务包括传统及新兴行业研究、商业计划书、可行性研究、市场调研、专题报告、定制报告等。涵盖文化体育、物流旅游、健康养老、生物医药、能源化工、装备制造、汽车电子等领域,还深入研究智慧城市、智慧生活、智慧制造、新能源、新材料、新消费、新金融、人工智能、“互联网+”等新兴领域。
","gnid":"952fd56a98329e154","img_data":[{"flag":2,"img":[{"desc":"","height":"480","title":"","url":"https://p0.ssl.img.360kuai.com/t01f8341014970388ed.jpg","width":"705"},{"desc":"","height":"313","title":"","url":"https://p0.ssl.img.360kuai.com/t012b860d110b42fe4c.jpg","width":"705"},{"desc":"","height":"400","title":"","url":"https://p0.ssl.img.360kuai.com/t017fda18c783af0174.jpg","width":"705"},{"desc":"","height":"392","title":"","url":"https://p0.ssl.img.360kuai.com/t012e7b52b3b7d99c44.jpg","width":"705"},{"desc":"","height":"400","title":"","url":"https://p0.ssl.img.360kuai.com/t010061bd2156a0ba1b.jpg","width":"705"},{"desc":"","height":"392","title":"","url":"https://p0.ssl.img.360kuai.com/t01f96713cc90286b2c.jpg","width":"705"},{"desc":"","height":"400","title":"","url":"https://p0.ssl.img.360kuai.com/t01a14db96ebf41615f.jpg","width":"705"},{"desc":"","height":"392","title":"","url":"https://p0.ssl.img.360kuai.com/t013d0f8a20ccee02b8.jpg","width":"705"},{"desc":"","height":"400","title":"","url":"https://p0.ssl.img.360kuai.com/t0167402429394c210a.jpg","width":"705"},{"desc":"","height":"392","title":"","url":"https://p0.ssl.img.360kuai.com/t0172f97ac3a9d1bd10.jpg","width":"705"}]}],"original":0,"pat":"art_src_3,fts0,sts0","powerby":"pika","pub_time":1695692220000,"pure":"","rawurl":"http://zm.news.so.com/132db5edf3d3ccd251b2cf16773af6c6","redirect":0,"rptid":"dffced2a3ecfa1d2","rss_ext":[],"s":"t","src":"华经情报网","tag":[{"clk":"ktechnology_1:工业机器人","k":"工业机器人","u":""}],"title":"《2023年中国工业机器人行业深度研究报告》-华经产业研究院发布
卫屠沫3501直角坐标式机器人有哪些特点及何处常应用? -
汲府文13897292574 ______ 直角坐标机器人概念: 工业应用中,能够实现自动控制的、可重复编程的、多功能的、多自由度的、运动自由度建成空间直角关系、多用途的操作机.他能够搬运物体、操作工具,以完成各种作业.关于机器人的定义随着科技的不断发展,在不...
卫屠沫3501安川机器人原点怎么设置?
汲府文13897292574 ______ 安川模式:机器人→原点位置→点显示,选择要设定的轴和机器人1,写入原点数据,→ 点编辑' →选择全部轴→确认(是) R1机器人轴;S1焊枪轴;S5 S6 外部轴
卫屠沫3501安川机器人怎么操作?
汲府文13897292574 ______ 1、按下示教编程器的[伺服准备],[伺服接通]LED灯会闪烁. 2、握住示教编程器的启动开关,会接通伺服电源.示教编程器的 [伺服接通]LED灯就会亮起. 3、 注意本体的位置及姿势,把速度调到低速,防止发生危险 4、 用关节坐标或直角坐标带动机器人.
卫屠沫3501直角坐标机器人的电气原理图 -
汲府文13897292574 ______ 有是有,不过是公司的知识产权.不能直接给你.但是可以分为四个部分.1、主电路,主要的电源的排布;2、I/O口,定义好输入输出,传感器、开关、伺服信号、继电器、电磁阀等.3、伺服信号插座的配线图.4、用电器输出图,主要是过完继电器的一些触点对应的输出
卫屠沫3501安川机器人怎么操作啊?有朋友知道吗?安川机器人怎么操作啊?有朋友?
汲府文13897292574 ______ 简单操作安川机器人 1、按下示教编程器的[伺服准备],[伺服接通]LED灯会闪烁. 2、握住示教编程器的启动开关,会接通伺服电源.示教编程器的 [伺服接通]LED灯就会亮起. 3、注意本体的位置及姿势,把速度调到低速,防止发生危险 4、 用关节坐标或直角坐标带动机器人
卫屠沫3501工业机器人有几种坐标形式? -
汲府文13897292574 ______ 工业机器人按坐标形式的分类 一、直角坐标机器人 直角坐标机器人具有空间上相互垂直的多个直线移动轴,通常为3个轴,通过直角坐标方向的3个独立自由度确定其手部的空间位置,其动作...
卫屠沫3501安川机器人io信号配置
汲府文13897292574 ______ 安川机器人io信号的配置:机器人支持的现场总线通讯基板与plc通讯,目前支持的有cclink,profibus,devicenet等,或者直接通过io方式与机器人预留的40/40输入输出io信号基板通讯
卫屠沫3501机器人从直角坐标系中的点A出发,沿西南方向行驶了4 2个单位,到达B点,此时原点在它的南偏东45°的方向上,原来点A的坐标可能为( ) -
汲府文13897292574 ______[选项] A. (8,0) B. (0,8) C. (4 2,0) D. (0,4 2)
卫屠沫3501首钢莫托曼机器人直角坐标不正确怎么解决 -
汲府文13897292574 ______ 机器人原点错了,重新设置原点,或者叫安川的来用电脑做原点校正
卫屠沫3501安川机器人通用显示区有哪些内容?
汲府文13897292574 ______ 在通用显示区,可对程序、特性文件、各种设定进行显示和编辑. 根据画面的不同,画面下方显示操作键. 按[区域]+光标[下]键,光标从通用显示区移动到操作键.按[区域]+光标[上]键,或按[清除]键,光标从操作键移动到通用显示区.按光标[左]或光标[右]键,光标在操作键之间移动. 要执行哪个操作键,则把光标移动到该操作键上,然后按[选择]键.