9点标定公式
【太平洋汽车 行业频道】
自动驾驶需要各类传感器来感知周围环境,传感器数据(图像、点云等)上的坐标与真实世界中的物体的坐标存在对应的转换关系。这一转换关系可通过建模获得的公式计算。
这些公式中有的包含传感器的外部参数,有的也包含传感器的内部参数。外部参数主要和传感器的安装方位有关,内部参数主要和焦距、激光发射器坐标等内因有关。
传感器的标定工作,就是通过实验得出传感器内外参数,从而实现各传感器的坐标统一。
相机的内参主要有焦距、镜像畸变量级、缩放比例因子、主点等,外参主要有相机的平移向量、旋转矩阵等。相机内参模型使用最广泛的是张正友的针孔模型,而视野广、畸变大的相机会选择鱼眼模型或者全景模型。相机的内参标定目前业内最广泛应用的是“张正友标定法”,通过采集不同角度棋盘格标定板图像的坐标数据,计算出相机的内参。
对比针孔模型+棋盘格标定板和鱼眼模型+ChArUco标定板的标定效果,可以看出后者的角点覆盖范围更大,去畸变效果也更好。

针孔模型+棋盘格标定板标定效果(此图中将ChArUco标定板当做棋盘格标定板使用)
鱼眼模型+ChArUco标定板标定效果
相机的外参标定亦可通过采用多个点的坐标数据来求得。
相机外参标定-前视

相机外参标定-车身前侧

相机外参标定-车身后侧
激光雷达的内参标定指的是激光雷达内部发射器坐标和雷达自身坐标的转换关系,这一标定工作在激光雷达出厂前就已经完成。激光雷达的外参标定则主要通过采集多个点在激光雷达与现实世界坐标,来求解系列方程,从而求出俯仰角、横滚角、航像角、纵向位移等外部参数。
激光雷达的外参标定
传感器的标定除了要进行各传感器自身的标定之外,还要进行相机之间的标定、激光雷达和激光雷达之间的标定、激光雷达与惯性导航单元(IMU)的标定、以及相机和激光雷达的联合标定等标定工作,最终实现多个传感器坐标的统一。
多相机之间的标定
激光雷达与相机之间的标定
目前,自动驾驶的激光雷达正在向固态激光雷达转换,自动驾驶公司元戎启行早在2021年就推出了全部采用固态激光雷达的方案。相比起机械雷达,固态激光雷达的FoV(视场角)非常小,多个雷达的重叠区域非常小,因此要采用与机械式激光雷达不同的算法来进行固态激光雷达之间的标定。面对这一问题,元戎启行采用了基于先验地图的多帧联合优化算法,成为了业内率先进行固态激光雷达标定的L4级自动驾驶企业。

元戎启行的激光雷达标定效果
在自动驾驶的早期研发阶段,传感器的标定还未形成高效的模式,主要的几种标定方式有轮廓对齐、环境重建等方式,但这些方式不是准确性不理想,就是对环境的要求过高,有的需要在户外进行长时间的实验,标定效率低。随着自动驾驶进入量产阶段,这类标定方法将不再适用,业内需要的是高效、准确的标定模式——标定车间。
标定车间是一个高度定制化的场地,主要由标定标志物、标定平台、照明设备组成。标定标志物目前主要指标定板,包括棋盘格标定板、ArUco标定板、圆形网格标定板、ChArUco标定板等。企业可根据采用的算法选择不同类型的标定板,有些企业也采用屏幕显示标定板的方式进行标定。
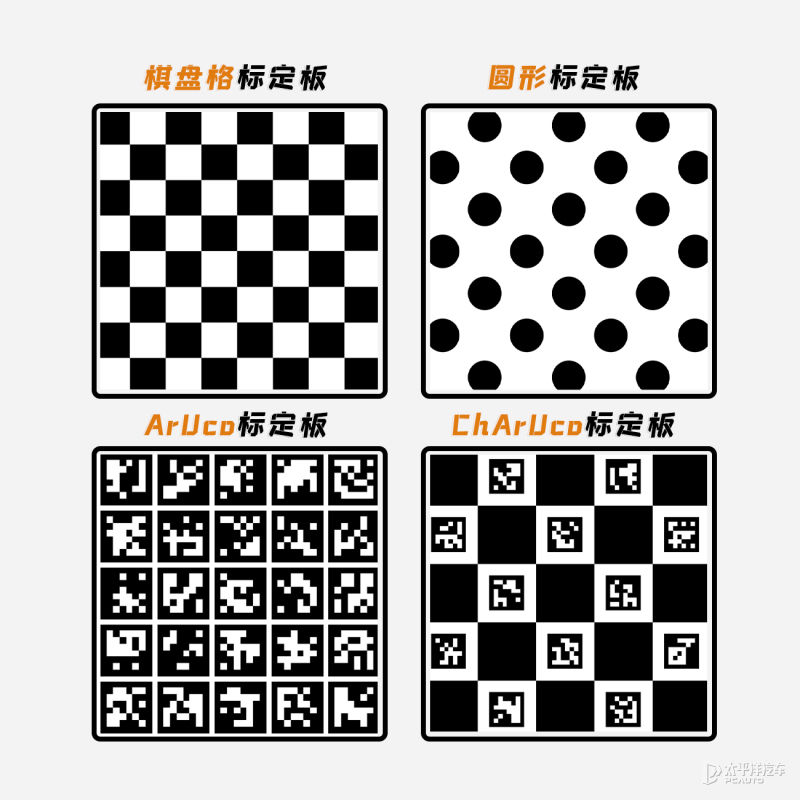
标定板类型
ChArUco标定板结合了棋盘格标定板和ArUco标定板的优点,其内部的每一个ArUco码具有特定的id和方向,因此标定板角点的坐标排序不会因为遮挡而失败。但相对而言,采用ChArUco标定板的算法的实现难度也更大。

标定平台有转台、滚轮、地面围栏等形式。滚轮、地面栏杆主要通过控制车辆的对中,来确保标定的统一性,这两种方案所采用的标定板位置是固定的,并且需要提前对环境进行建模,。
相较于前两种平台,车辆在转台上进行标定,不用提前进行环境建模,可采集到不同方面的标定板图像,对车辆位置没有一致性要求,可在1分钟内自动化完成车辆的标定,对车辆车型没有限制,也不需要固定标定板的位置,灵活度更高。

自动驾驶轻卡的标定
由于标定车间是一个较为固定的环境,可以实现更高精度、更一致的传感器标定。对于智能驾驶汽车量产来说,标定车间更便于形成标准化作业流程,在满足各项标准的条件下,衔接到车辆生产车间中,实现车辆出厂前的传感器标定,确保自动驾驶的安全。有业内人士透露,由于标定车间并不是车厂的原有标配,在元戎启行在与车厂的合作中,双方就“标定车间方案”也展开了共同研究,为高阶自动驾驶的量产做准备。
","force_purephv":"0","gnid":"9450e6e0ae12e294b","img_data":[{"flag":2,"img":[{"desc":"","height":"281","s_url":"https://p0.ssl.img.360kuai.com/t01985ab64614281543_1.gif","title":"","url":"https://p0.ssl.img.360kuai.com/t01985ab64614281543.gif","width":"500"},{"desc":"","height":"281","s_url":"https://p0.ssl.img.360kuai.com/t01a46cf687d71fc8e6_1.gif","title":"","url":"https://p0.ssl.img.360kuai.com/t01a46cf687d71fc8e6.gif","width":"500"},{"desc":"","height":"281","s_url":"https://p0.ssl.img.360kuai.com/t01b7e5bc268fc6af6e_1.gif","title":"","url":"https://p0.ssl.img.360kuai.com/t01b7e5bc268fc6af6e.gif","width":"500"},{"desc":"","height":"281","s_url":"https://p0.ssl.img.360kuai.com/t014f76149854bc2e22_1.gif","title":"","url":"https://p0.ssl.img.360kuai.com/t014f76149854bc2e22.gif","width":"500"},{"desc":"","height":"281","s_url":"https://p0.ssl.img.360kuai.com/t01dc1c9ca7aa66a8b1_1.gif","title":"","url":"https://p0.ssl.img.360kuai.com/t01dc1c9ca7aa66a8b1.gif","width":"500"},{"desc":"","height":"281","s_url":"https://p0.ssl.img.360kuai.com/t01a6252e305175eb35_1.gif","title":"","url":"https://p0.ssl.img.360kuai.com/t01a6252e305175eb35.gif","width":"500"},{"desc":"","height":"281","s_url":"https://p0.ssl.img.360kuai.com/t01e3a5c1170a077ccf_1.gif","title":"","url":"https://p0.ssl.img.360kuai.com/t01e3a5c1170a077ccf.gif","width":"500"},{"desc":"","height":"281","s_url":"https://p0.ssl.img.360kuai.com/t01d6ddead656270cf9_1.gif","title":"","url":"https://p0.ssl.img.360kuai.com/t01d6ddead656270cf9.gif","width":"500"},{"desc":"","height":"423","title":"","url":"https://p0.ssl.img.360kuai.com/t01660e4141d8a7b1b0.jpg","width":"800"},{"desc":"","height":"800","title":"","url":"https://p0.ssl.img.360kuai.com/t010c15990f57c84f3b.jpg","width":"800"},{"desc":"","height":"450","title":"","url":"https://p0.ssl.img.360kuai.com/t01ac0ba5dc979769d3.jpg","width":"800"},{"desc":"","height":"450","title":"","url":"https://p0.ssl.img.360kuai.com/t0115b8006eb28587be.jpg","width":"800"}]}],"original":0,"pat":"art_src_1,fts0,sts0","powerby":"hbase","pub_time":1666800555000,"pure":"","rawurl":"http://zm.news.so.com/8678583150096b1890debf138a462d4b","redirect":0,"rptid":"aee2e3189c86471b","s":"t","src":"太平洋汽车网","tag":[{"clk":"ktechnology_1:相机","k":"相机","u":""},{"clk":"ktechnology_1:自动驾驶","k":"自动驾驶","u":""},{"clk":"ktechnology_1:雷达","k":"雷达","u":""}],"title":"为什么自动驾驶的量产需要标定车间?
蔚劳泉2070请问通达信软件时间从9点到11点的时间公式是如何编写的?(超过这个时间就不统计) -
宓以晓13298392936 ______ a1:=ma(c,10)>ma(c,20); a2:=ma(c,20)>ma(c,30); xg: a1 and a2;
蔚劳泉2070小刚傍晚7点多开始写作业,钟表上的时针和分针正好重合在一起,9 点多做完作业 -
宓以晓13298392936 ______ 分针走一圈,时针走一圈的12分之1, 也就是说 分针走360度,时针走30度. 7时多的时针分针重合, 所以,这时的角度就是210*12/11 分钟的时间就是210*2/11分 同理,9点就是270*2/11分 那么,军军所用时间就是 (270*2/11)/60-(...
蔚劳泉2070计算6:30开始过了2小时30分是几点请大侠帮忙,用什么公式? -
宓以晓13298392936 ______ 直接相加啊.. 6:30+2:30=9点 所以是9点 很高兴为您解答,祝你好运!【数学之美】团队为您答题. 有不明白的可以追问!如果您认可我的回答. 请点击下面的【选为满意回答】按钮,谢谢!
蔚劳泉2070东八区为8点东九区几点 -
宓以晓13298392936 ______[答案] 是九点啦 区时的计算公式是:未知区时=已知区时+(-)时区差.注意,东加西减,并且相邻时区相差1小时.东加西减的意思是,如果要求的区时位于已知区时的东部,则使用公式中的加.如果要求的区时位于已知区时的西部,则使用公式中的减.
蔚劳泉2070液体2100毫升,每分钟40滴,九点开始,多少个小时滴完?求公式? -
宓以晓13298392936 ______[答案] 答:经过17.5小时滴完. 高中化学老师一般会提到一滴约是0.05毫升. 则有, 2100/(0.05X40)=1050分钟 1050/60=17.5小时, 从九点开始,需要经过17.5小时滴完.
蔚劳泉2070盐酸标定公式在用无水碳酸钠标定盐酸时,计算盐酸浓度的计算公式是什么,各字母含义是什么单位是什么说下,还有问问这公式是怎么推出来的,在下化... -
宓以晓13298392936 ______[答案] HCL+Na2Co3 == Nacl+H2o 因为配平的话.水需要两个氢原子.所以HCL需要两份就变成了 2Hcl+Na2Co3 == 2Nacl+H2o .因此标定反应完之后盐酸和无水碳酸钠的比是2:不知道对不对噢.
蔚劳泉20703个点6个点9个点百分比计算公式 -
宓以晓13298392936 ______[答案] 3个点是百分之三 符号是3% 计算式 A*(1+3%)=税后价格 这是3个点的 别的以此类推.另外1+3%计算时候是1+0.03
蔚劳泉2070五点定标怎么计算标准浓度 -
宓以晓13298392936 ______ 先用5个标准浓度测得5个吸光度,然后以浓度为横坐标、对应的吸光度作纵坐标描出5点,这5点连线应该接近一条直线(可用ExCel模拟出线性方程).在同样条件下测定未知浓度溶液的吸光度,然后用找图法或用比较法算得其浓度大小.
蔚劳泉2070怎样计算昼长和夜长啊?比如,某地日出时间为9点,求昼长!但书上有公式昼长时数=(12 - 日出时间)乘2=(日落时间 - 12)乘2,我用这个计算出的结果不... -
宓以晓13298392936 ______[答案] 那个公式用的是当地地方时,那个9点是北京时间,可以换算为当地时间的
蔚劳泉2070怎么让单元格在指定时间后显示为当天日期,指定时间前显示为上一天的日期. -
宓以晓13298392936 ______ G2公式下拉:=IF(F2="","",DATE(YEAR(H2),MONTH(H2),DAY(H2)+(HOUR(H2)完成后需把G列设置为日期格式.或者用以下公式一步到位,可以不用设置G列格式.=IF(F2="","",TEXT(DATE(YEAR(H2),MONTH(H2),DAY(H2)+(HOUR(H2)